
Robot gives a polished performance
9th Jul 2024 | In News | By Mike Richardson

Peter Knight, technology manager at Midlands Aerospace Alliance (MAA) describes how a grant from the MAA/University of Nottingham Aerospace UP programme has helped Zeeko develop a robotic freeform polishing system targeted specifically at aerospace applications.
Based in Coalville Leicestershire, Zeeko has progressed from being a start-up company with innovative technology to polish ultra precision surfaces for telescope mirrors and other optical surfaces, to become a market leader with a wide polishing and metrology product portfolio that competes impressively in a global marketplace.
Although many Zeeko machines have ended up in the space sector, it is highly likely that the optical lenses of the smart phone in your pocket have been made from moulds polished by a Zeeko machine.
Central to Zeeko’s polishing process is a suite of shape-adaptive grinding (SAG) tools. These are semi-elastic tools consisting of a rigid stem holding a compliant rubber pad onto which an abrasive pellet layer is applied. The SAG process is at the heart of each special purpose polishing machine, but also works extremely well on 5-axis CNC milling machines where the requirement for polishing is intermittent.
Automate to innovate
Automating the polishing of freeform surfaces presents its challenges, but where the amount of material removal required is relatively uniform over the part, the technique works well. However, if the required amount of material removal varies because of inaccuracies or distortions in the shape of the part being polished, then using SAG as a way of restoring the part to its desired dimensions is problematic. The specific case which Zeeko were presented with was an additively manufactured (AM) turbine blade. By applying controlled pressure with the tool as it traverses over the surface of the part will produce a beautifully shiny, but still non-conforming part. In this situation the tool would need to follow the original CAD trajectory so that the necessary corrections to the profile are made at the same time as polishing the build marks off the surface. On a CNC milling machine this can be achieved but at a cost.
Richard Freeman, managing director of Zeeko, envisaged an alternative, lower cost solution in the form of a highly accurate robot cell dedicated to grinding and polishing of critical components such as AM blades. The ability to automate the loading and unloading of blades means that this solution is a far more attractive proposition, providing a cost-effective use of both capital equipment and resources for the serial machining of blades. It does however present two significant challenges. Firstly, industrial robotic arms are not sufficiently stiff and backlash free to guarantee both spatial and trajectorial accuracy of the tool compared to machine tools. Secondly it is necessary to know the true shape of the blade and its exact position within the working envelope in order that a CAD ‘error path’ for the tool can be calculated. Only then could both corrective grinding and polishing be achieved in a single operation.
Potential unlocked!
Fortunately, a grant from the Aerospace – Unlocking Potential (Aerospace UP) Programme proved to be the catalyst which helped turn these innovative ideas into reality. Aerospace UP was a £20 million, ERDF-supported R&D initiative (2020-2023) which was delivered jointly by the University of Nottingham and the Midlands Aerospace Alliance, helping the aerospace supply chain in the Midlands unlock its innovation potential.
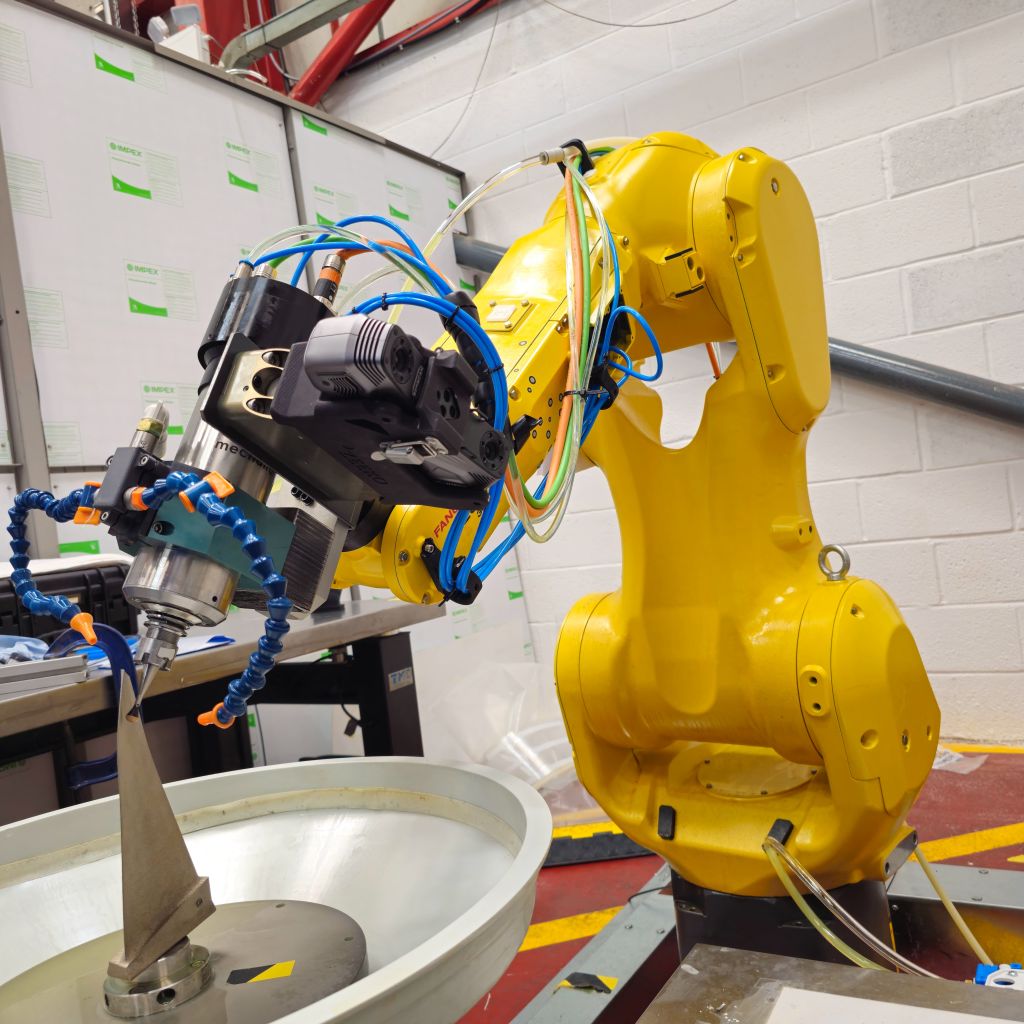
The Aerospace UP project entitled ‘Self-calibrating Robot Polishing Cell’ featured a FANUC robot arm adapted to pick up either the turbine blade to be machined, a Scantech portable 3D laser scanner, or the SAG tool in an automated sequence. It was clear from the outset that the key to success of the project would rest upon the efficacy of the calibration system, and much time was spent understanding the results from an initially proposed tactile system using precision-ground spheres at known locations. Research work by Zeeko suggested an optical-based system using stereoscopic high-speed cameras to track artefacts on the robot end effector in space would yield better results. This highly accurate system did, however, reveal that the point-to-point movement of the robot, especially in response to linear movement commands, was not as smooth as previously assumed. Some of these errors were simulated and eventually mitigated through careful calibration of the robot arm, utilising FANUC Roboguide and Zeeko’s own VP-Zero machine calibration hardware.

The other significant area of research was around the use of the robot-held laser scanner to identify the exact shape and position in space of the target blade. This required development of a scanning strategy to obtain a point cloud mesh, from which an accurate 3D model could be derived. To identify an optimal scanning strategy that encourages the scanning arm to moderate its speed, a probabilistic learning algorithm was developed giving users control over the robot's decision-making process. This allows for targeted assignment of scanning quality, and the system learns from experience, facilitating growth in the customer base.
As the robot trains on specific types of blade families, which vary for one user to another, it improves at drawing statistical conclusions from highly rewarding path decisions. Once a satisfactory scan is completed, the model is then automatically imported into Zeeko’s ZephyrCAM software to generate a SAG toolpath which considers any component errors and distortion. The final stage of the process involves the robot exchanging the scanner head for the SAG tool in order that grinding and polishing operations can begin, and a polished and geometrically within-tolerance finished blade can be produced.
Since completing the Aerospace UP project Zeeko has carried out further research on optimising the tools to cope with the requirement for bulk material removal rates when polishing alone is not enough. New hybrid tool versions named Mill-SAG and Grind-SAG have been produced where the spring-loaded SAG pad in the centre of the tool stabilises the tool and eliminates the ‘chatter’ or ‘judder’ that is so familiar when the rather elastic platform of the robot is used for milling purposes. This development was initiated in response to a customer enquiry about the removal of welded fillets on repaired turbine blades.
Consider a free digital subscription
If you find this article informative, consider subscribing digitally to Aerospace Manufacturing for free. Keep up to date with the latest industry news in your inbox as well as being the first to receive our magazine in digital form.








